|
I am a Ph.D. student in the Robotics Institute at Carnegie Mellon University, supervised by Prof. Jiaoyang Li . I completed my MSc in Computer Science at the University of Toronto, co-advised by Prof. Florian Shkurti and Prof. Tim Barfoot. I received a Bachelor of Applied Science in Engineering Science from the University of Toronto. I have been fortunate to work under many fantastic researchers in robotics. Previously, I collabrated with Prof. Fabio Ramos from Nvidia on task and motion planning. In undergrad, I was involved in the student design team aUToronto, where we competed and won the SAE Autodrive Challenge. I also spent one amazing summer in Israel with Prof. Amir Degani and the summer before that with Prof. Angela Schoellig. Email / CV / Resume / Google Scholar / LinkedIn / Twitter / Github |
|
|
My research focuses on developing planning algorithms for (multiple) robots to accomplish long-horizon tasks in dynamic and uncertain environment. I am particuarly interested in solving problems in real-world robotics and have worked on many different applications, such as multi-robot assembly and bimanual manipulation. If you have any questions / want to collaborate, feel free to reach out and send me an email! I am very excited to talk with more people and learn about your work! |
|
|
| June 2025 | Our new paper on multi-robot shortcutting has been accepted to IROS 2025! |
| May 2025 | Our work on multi-level reasoning for LEGO assembly won the Best Poster Finalist in the Language and Semantics of Task and Motion Planning workshopat ICRA 2025! |
| Apr 2025 | Our work on dual arm assembly, has been accepted to RSS 2025! |
| Mar 2025 | Our work, STAMP, has been accepted to IEEE Robotics and Automation Letters (RA-L). |
| Nov 2024 | Gave a research talk at the USC IDM lab on multi-robot assembly. |
| Nov 2024 | Honored to be awarded the Alan Guisewite Memorial Fellowship from the Robotics Institute. |
| Oct 2024 | Featured in a Modern Machine Shop article on our Multi-arm Lego Assembly Testbed. |
|
|
|
Philip Huang, Yorai Shaoul, Jiaoyang Li To appear in IROS, 2025 Code Dataset and evaluation of an under-investigated problem in multi-robot arm motion planning. |
|
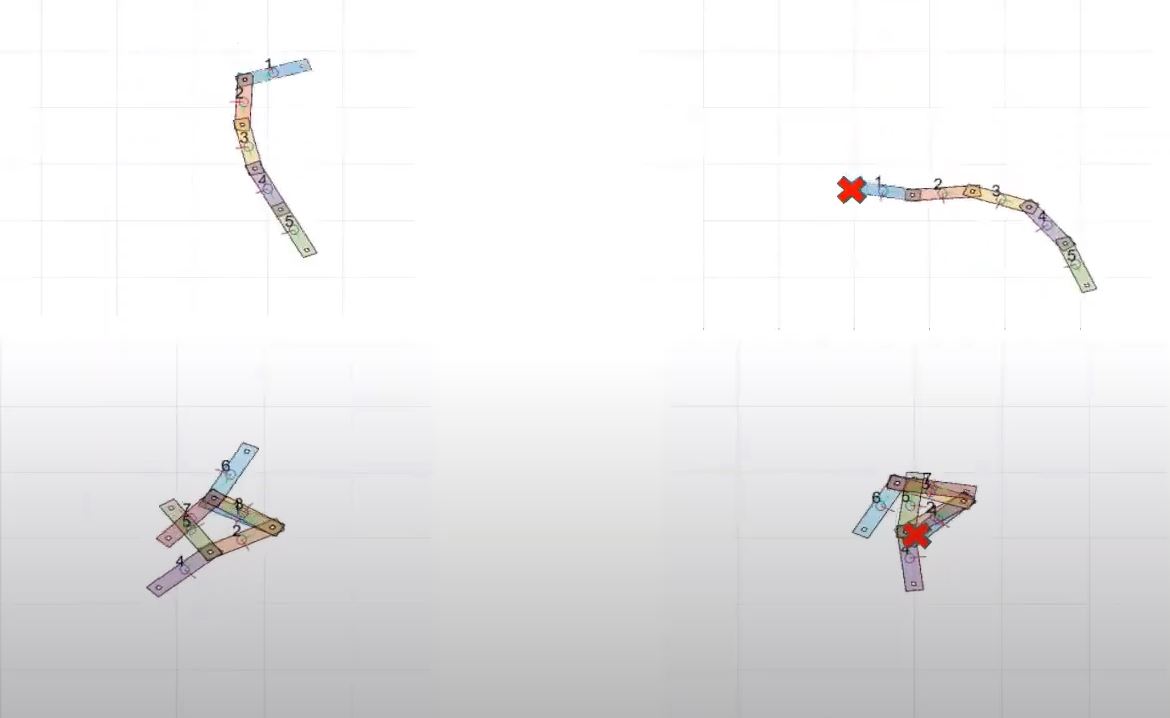
Philip Huang*, Ruixuan Liu* , Shobhit Agarwal, Changliu Liu , Jiaoyang Li Robotics Science and Systems (RSS), 2025 Website / arXiv / Code / Video An asynchronous planning and execution framework designed to safely and efficiently coordinate multiple robots arms to achieve cooperative assembly |
|
Yewon Lee, Andrew Z. Li, Philip Huang, Eric Heiden, Krishna Murthy Jatavallabhula, Fabian Damken, Kevin Smith, Derek Nowrouzezahrai, Fabio Ramos, Florian Shkurti IEEE RA-L Website / doi / arXiv / Video / Leveraging parallel and differentiable simulation to efficiently search for multiple diverse plans with gradient-based variational inference. |

|
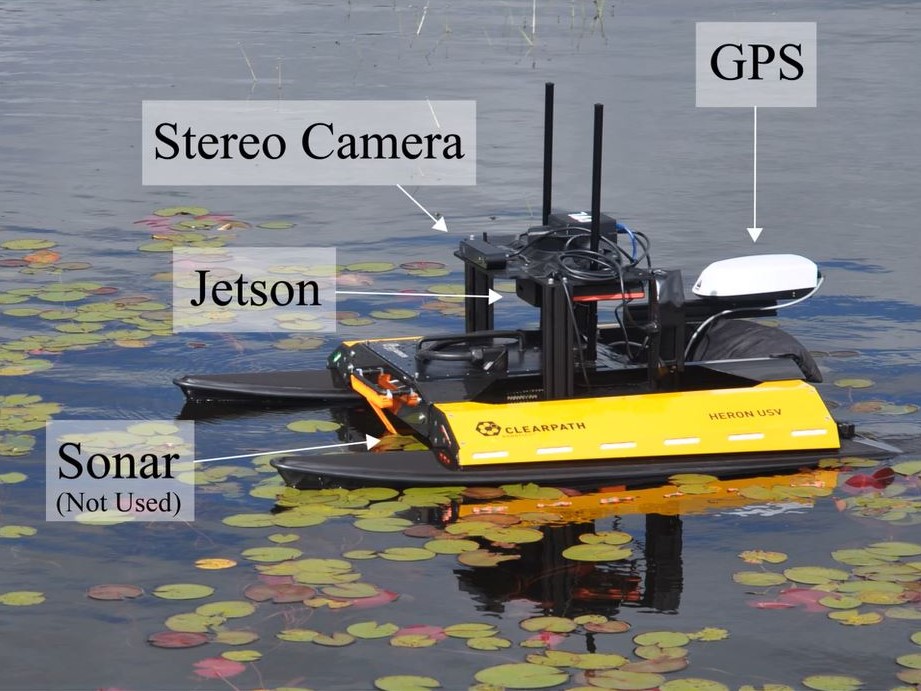
Philip Huang, Tony Wang, Florian Shkurti, Timothy D. Barfoot, IEEE Transactions on Field Robotics (T-FR), 2024 doi / arXiv / Video / Field testing and system descriptions of our GPS-, vision-, and sonar-enabled autonomous vessel for water-quality monitoring in freshwater lakes. |
|
Yizhou Huang, Hamza Dugmag, Timothy D. Barfoot, Florian Shkurti ICRA, 2023 Website / arXiv / Code / Video / A robust route-planning algorithm uses satellite images as a corase map to plan water sampling routes for autonomous surface vessels (ASV) given environmental disturbances. |
|
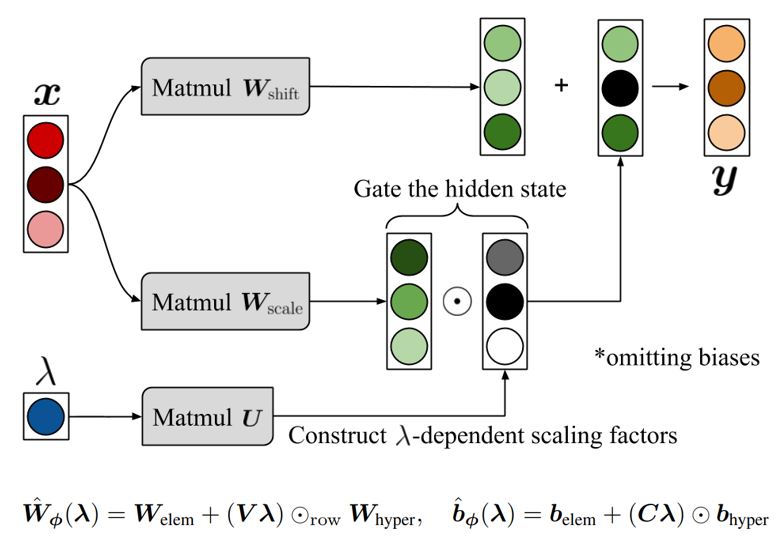
Yizhou Huang, Kevin Xie, Homanga Bharadhwaj, Florian Shkurti ICRA, 2021 and Deep RL Workshop (NeurIPS 20) Website / arXiv / Video / Code Task-conditioned hypernetworks can be used to continually adapt to varying environment dynamics in lifelong model-based reinforcement learning, with a fixed-size replay buffer. |

|
Keenan Burnett, Jingxing Qian, Xintong Du, Linqiao Liu, David J. Yoon, Tianchang Shen, Susan Sun, Sepehr Samavi, Michael J. Sorocky, Mollie Bianchi, Kaicheng Zhang, Arkady Arkhangorodsky, Quinlan Sykora, Shichen Lu, Yizhou Huang, Angela Schoellig, Timothy D. Barfoot, Journal of Field Robotics, 2021 arXiv / Video System design and development of the winning self-driving car in the AutoDrive Challenge, as well as lessons learned. |
|
|
|
Yizhou Huang Bachelor Thesis Supervisor: Florian Shkurti Thesis pdf/ Presentation In continual learning, self-tuning network (STN) is a memory-efficient and easy-to-implement hypernetworks architecture with strong performance on many benchmarks. |
|
|
|
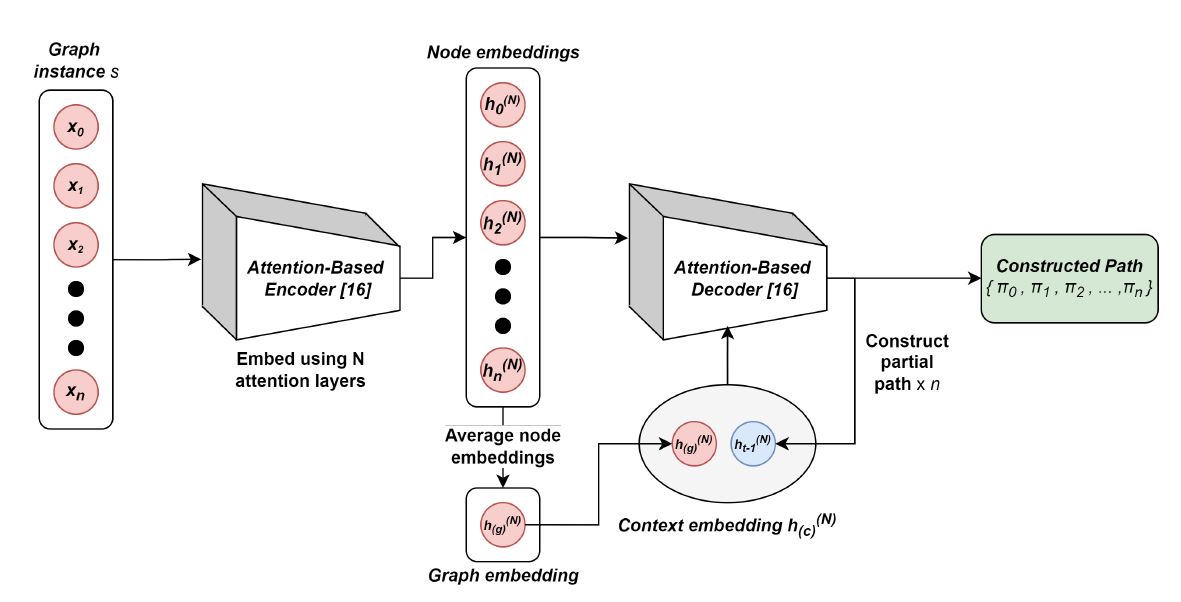
Course Project University of Toronto, MIE 1666 Machine Learning for Mathematical Optimization Final Report/ Presentation/ Code RL can be applied to the Minimum Latency Problem by using a graph attention network to encode stochastic policy for constructively building partial paths, yielding solutions which are comparable to state-of-the-art, hand-engineered methods. |
|
Course Project University of Toronto, CSC 2549 Physics-based Animation Final Report/ Video/ Code Re-implemented the SIGGRAPH 96 paper from David Baraff that introduced a linear-time sparse solver with Lagrangian multiplers in MATLAB. Verified that the time complexity of our re-implemented sparse solver is linear with serial chains and trees. |
|
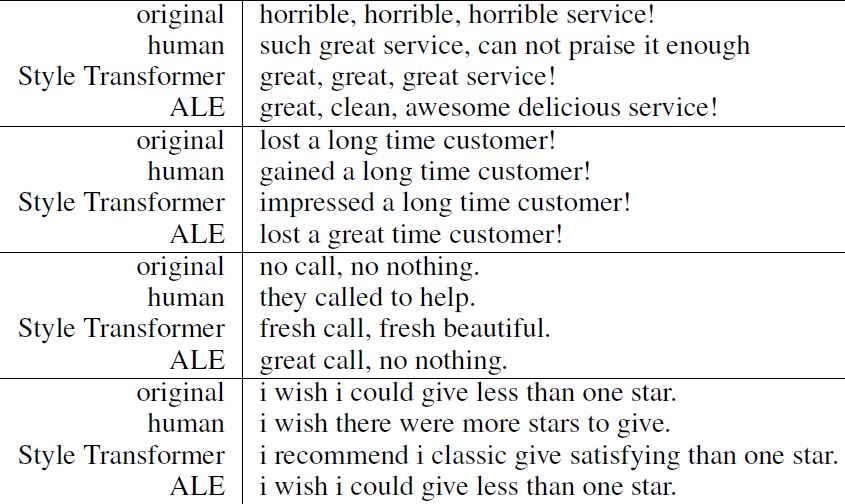
Course Project University of Toronto, CSC 413 Neural Networks and Deep Learning Final Report/ Code (Style Transformer)/ Code (ALE Model) We measured the quantitative performance of recent language models for text style transfer, using three metrics and third-party models for fair comparison. |
|
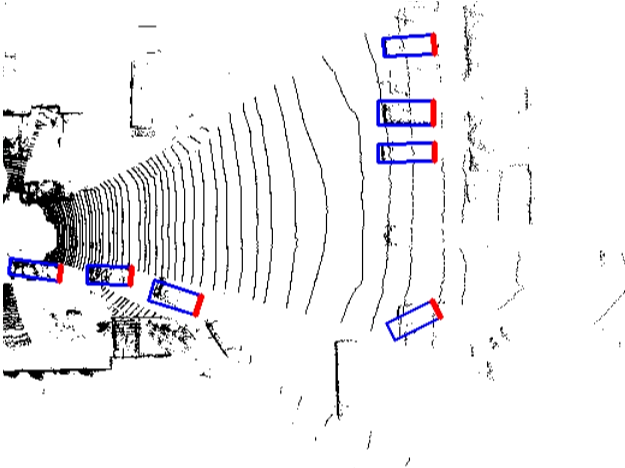
Course Project University of Toronto, MIE 324 Introduction to Machine Intellitenge Final Report/ Code (>250 Stars) Re-implementation of the paper PIXOR: Real-time 3D object Detection from Point Clouds using PyTorch. |

|
Summer Research Project CEAR Lab, Technion Demo Video Indoor localization and navigation of a Crazyflie nano-quadcopter with a RGB-D camera for pollinating sunflowers. |

|
Summer Research Project Dynamic Systems Lab, University of Toronto Demo Video/Technical Report Designing software framework and simulations for flying a swarm of 9 Crazyflie nano-quadcopters indoors. |
|
|
|
Reviewer, IROS 2022, 2023
Reviewer, ICRA 2023, 2024 Reviewer, MetaLearn Workshop NeurIPS 2020 Graduate Student Mentor, PRISM Workshop 2022 |
|

|
Teaching Assistant at University of Toronto
CSC477 Fall 2021, CSC317 Fall 2022, CSC384 Winter 2023 |
|
This template is from Jon Barron's website. Here is the source code |